推測航法(デッドレコニング)とは|原理・歴史とGPS時代の役割
推測航法(デッドレコニング)の原理と歴史、GPS時代での役割と実用性をわかりやすく解説。航海・航空で今も使われる必須知識を短時間で学べます。
推測航法(デッドレコニング、DR)は、最後に確かめられた位置(フィックス)を出発点として、その後の速度と進行方向、経過時間から現在の位置を推定する航法法です。基本的な考え方はシンプルで、移動距離=速度×時間、移動方向はコンパスや方位計で得られる方位角を用いて、既知の位置からベクトル的に新しい位置を求めます。これはナビゲーションの重要な一部であり、船舶・航空機・陸上車両などで利用されてきました。
画像ギャラリー
3 画像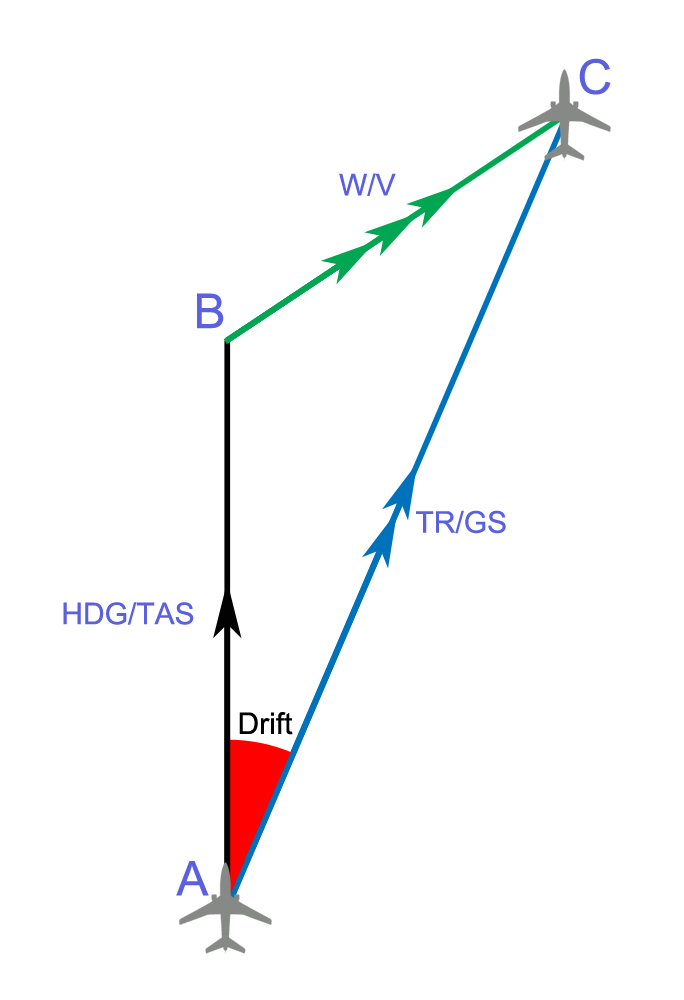


原理と計算の要点
- 基本式:新しい位置 = 最後のフィックス +(速度 × 時間)× 方向(方位)。
- 速度には「対地速度(ground speed)」と「対水/対気速度(speed through water / airspeed)」の違いがあり、海では潮流、空では風の影響を考慮する必要があります。
- 方位の取り扱いでは、磁針偏差やコンパス誤差、慣性系(ジャイロ)誤差が結果に影響します。
- 誤差は累積しやすく、時間や距離が増すほど位置のずれが大きくなるため、定期的なフィックスによる修正が不可欠です。
誤差の要因と低減方法
- 外的要因:海流、風、波、潮流(船の場合)や突風・偏西風(航空機の場合)などが移動経路を変えます。
- 計器誤差:速度計、コンパス、時計(時間計測)の誤差や読み取りミスが積み重なります。
- 人的要因:観測・記録の遅れや計算ミス。
- 誤差低減には、頻繁なフィックス(天測、陸標、レーダーやVOR/ADFなどの無線航法、GPSなど)でDRをリセットすること、複数のセンサ(慣性航法装置INS、Doppler、速度ログ)を組み合わせることが有効です。
歴史的背景
推測航法は古くから使われてきた航法法で、クリストファー・コロンブスが新世界に航海した時代の船乗りたちも基本的にこれを用いて世界を航海・地図化しました。彼らは星を利用して緯度を測定することはできましたが、正確な時計が無い時代には経度の正確な算出が難しく、目視できる陸地に到達するまで正確な位置が分からないことが多かったため、推測航法が重要でした。
18世紀にジョン・ハリソンらが精密な航海用時計(海洋クロノメーター)を開発することで経度測定が飛躍的に改善されましたが、それでも推測航法は補助的かつ冗長な技術として残りました。20世紀の探検でも、例えばリチャード・バード(リチャード・E・バード)は1926年に北極へ飛行した際、長時間の飛行中に推測航法を用いて帰還しました(彼が下に見たのは氷原だけだったと記録されています)。
現代における役割(GPS時代でも重要な理由)
現在は多くの航行で全地球測位システム(GPS)やGNSSが主要な位置情報源となっていますが、推測航法が不要になったわけではありません。次のような状況でDRの知識と運用が重要です:
- GPSが受信できない・遮蔽される環境(トンネル、密林、建物陰、極域など)。
- GPSが妨害(ジャミング)や欺瞞(スプーフィング)を受けた場合のバックアップ。
- 太陽フレアでGPS衛星が通信や機器に影響を与えるなど、GNSSサービスが一時的に低下するリスクへの備え。
- 機器の故障、電源喪失、受信アンテナの損傷といった緊急時の冗長性。
さらに、現代のナビゲーションはDRに慣性航法装置(INS)、レーダー、無線航法、GPSを組み合わせたハイブリッドシステムが一般的で、DRの概念はこれらの融合運用の基礎にもなっています。
実務上のポイントと推奨事項
- 定期的にフィックスを取得してDRを修正する(目標はできるだけ短い更新間隔)。
- 潮汐・海流表、風予報を事前に確認し、進路修正を計画する。
- 計器校正と時間管理(正確なクロック)を怠らない。
- ログ(航海日誌)に速度・方位・時刻・修正理由をきちんと記録する。
- 緊急時には視覚的手がかりや他の航法手段と組み合わせて位置判断を行う。
まとめると、推測航法は歴史的に重要な航法法であり、GPSなどの現代技術と併用することで安全性と信頼性を高めます。完全な代替手段ではないものの、冗長性のために今なお教育・運用の現場で重視されています。

方法
デッドレコニングは既知の点(フィックス)から始まります。次に、車両の速度を知る必要があります。昔、船は丸太を横に投げて(ロープに結んで)、この丸太を通過するのにかかった時間を数えていました(または、結び目のあるロープを引っ張って、一定時間内に何本の結び目が引っ張られたかを数えていました)。そうすると、船の速度がわかります。コンパスで方向を知ることで方向がわかる。これら2つの数字から、車両の現在位置を推定することができます。しかし、風によって車両が一方に押し出される(ドリフトと呼ばれる)ので、これも測定する必要があります。また、海の中でも海流があります。これも時間が経つと誤差が出てくるので、海図は海流を補正するために作られました。
飛行機は風速を簡単に測ることができますが(どのくらいの速さで空中を進んでいるか)、陸地の上を移動しているかは測れません(対地速度と呼ばれています)。頭風、尾風、横風によって、対地速度が変化します。飛行機の高度が分かっている場合は、飛行機が地上の物体を通過する速さを計ることで、対地速度を知ることができます。高度が高ければ高いほど、地面の動きは遅くなるようです)。飛行機の床に窓があれば、対地速度や飛行機のドリフトを知ることができます。
地上の車両もデッドレコーニングを使用することができます。通常は風によるドリフトを気にする必要がなく、陸上では流れがないので、この方法の方が簡単です。
質問と回答
Q:推測航法(Dead Reckoning)とは何ですか?
A: 推測航法(DR)とは、最後に確認された地点、速度、移動方向から位置を推定する方法です。
Q: 推測航法は何に使われるのですか?
A: 推測航法は、船舶、飛行機、車両の位置を追跡するために使用されます。
Q: なぜ今、推測航法があまり使われていないのですか?
A: 全地球測位システム(GPS)がナビゲーションに使用されるようになり、推測航法はあまり重要ではなくなりました。
Q: どのような場面で推測航法が役に立つのでしょうか?
A: GPSが利用できない場所や、GPSの更新が遅れた短時間であれば、推測航法は有効です。
Q: なぜ推測航法について知っておくことが重要なのですか?
A:推測航法は、GPS衛星が破損したり、機器を紛失したりした場合でも、船員やパイロットが航行できるようにするために重要です。
Q: クリストファー・コロンブスが新大陸に渡った後、船員たちはどのように世界地図を作ったのですか?
A: 船員たちは、推測航法と星を利用して緯度を求め、世界地図を作りました。
Q: リチャード・バードは、どのようにして初めて北極に飛んだのでしょうか?
A: リチャード・バードは推測航法を使って1926年に北極点まで飛行し、16時間飛行した後、氷原しかない出発地点に戻りました。
関連項目
著者
AlegsaOnline.com 推測航法(デッドレコニング)とは|原理・歴史とGPS時代の役割 Leandro Alegsa
URL: https://ja.alegsaonline.com/art/25956
出典
- deadreckoning.com : "Reckoning Aviation Navigation"
- belfortinstrument.com : "How Byrd Navigated to the North Pole"
- ship468.org : "Sea Scout Ship, Navigation"