ロボットとは|定義・仕組み・種類とフィクションでの描写
ロボットとは何かを定義から仕組み・主要な種類、さらに小説や映画でのフィクション描写まで分かりやすく解説。初心者にも読める完全ガイド。
ロボットとは、人の代わりに行動し、そのために設計されたことを行うAI(人工知能)です。
ロボットは通常、コンピュータプログラムまたは電子回路によって制御される機械です。人間が直接制御することもあります。人間のように見えるように設計されることもあり、その場合、その行動は知性や思考を示唆することがある。ほとんどのロボットは特定の仕事をするもので、必ずしも人間のように見えるとは限りません。ロボットには様々な形態があります。
しかし、フィクションの世界では、ロボットはたいてい人間のように見え、それ自体が生命を持っているように見えます。ロボットが登場する本や映画、テレビゲームはたくさんあります。アイザック・アシモフの「I, Robot」は最も有名な作品だろう。
画像ギャラリー
10 画像







仕組みと主な構成要素
ロボットは複数の要素が組み合わさって動きます。主な構成要素は次の通りです。
- センサー(感覚器):カメラ、距離センサー、温度センサー、ジャイロなど、外界や自身の状態を検出します。
- アクチュエータ(駆動機構):モーターや油圧・空圧機器など、物理的な動作を生み出します。
- 制御系(コントローラ):センサー情報をもとにアクチュエータを制御するハードウェアとソフトウェアです。ここにAIや機械学習モデルが組み込まれることが増えています。
- ソフトウェア/アルゴリズム:経路計画、認識、意思決定、学習を担うプログラム群です。
- 電源・バッテリー:持続的に動作するためのエネルギー源。ケーブル給電のものもあります。
- 機体・フレーム:用途に応じた形状・素材。耐久性や柔軟性が求められます。
- 通信機能:遠隔操作や他のロボット・システムとの連携のための無線/有線通信。
ロボットの種類(代表例)
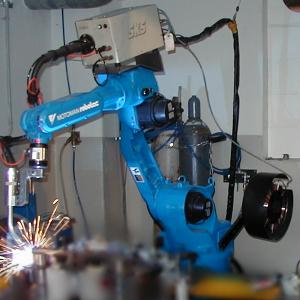
- 産業用ロボット:自動車組立や溶接、搬送など生産現場で使われる大型アーム型が多い。
- サービスロボット:接客、清掃、配膳など人と直接関わる用途のロボット。
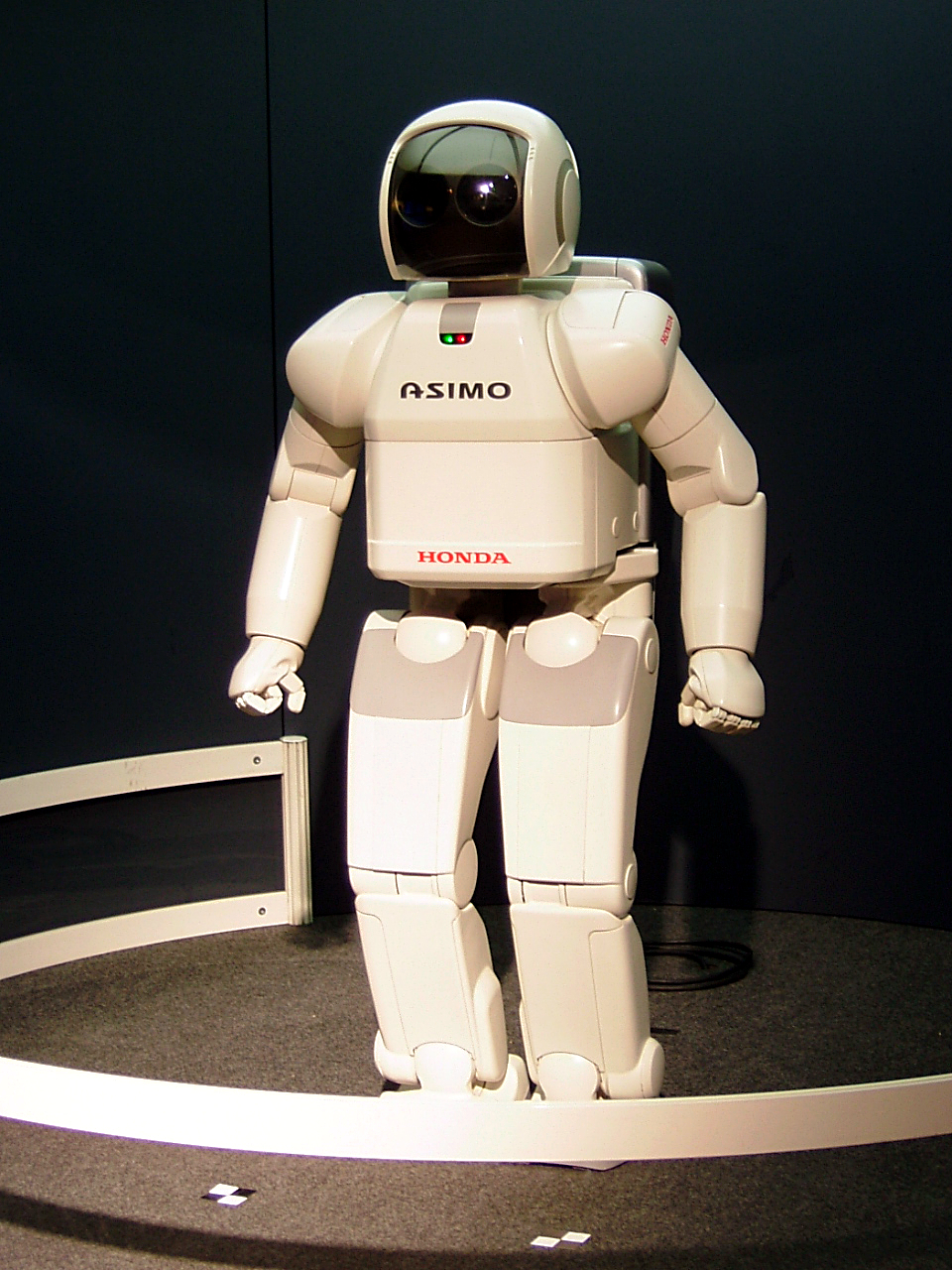
- ヒューマノイド(人型):人間の形状や動作を模したロボット。研究・接客・介護などで注目されています。
- 医療ロボット:手術支援ロボット、リハビリ支援ロボット、遠隔診療ロボットなど。
- 探索・探査ロボット:宇宙探査機、深海探査ロボット、災害現場での調査ロボット。
- ドローン(無人航空機):空中での撮影、測量、物流などで利用。
- 自律移動ロボット(AMR):倉庫内搬送や配達ロボットなど、自律で移動する機体。
- ソフトロボット:柔らかい素材でできたロボット。複雑な形状に適応しやすい。
- スワームロボット:多数の小型ロボットが協調してタスクを遂行する方式。
- テレオペレーション型:人が遠隔で操作するロボット(宇宙や危険環境で多い)。
自律性の段階
- 遠隔操作:人間が直接操作する。リアルタイムの判断を人が行う。
- 半自律(補助的自律):特定の処理は自動で行うが、重要な判断は人が介入する。
- 完全自律:環境を認識して自ら計画・行動する。障害対応や学習能力が求められる。
フィクションでの描写と現実の違い
フィクションの世界ではロボットはしばしば自我や感情を持ち、人間と同等かそれ以上の知性を示します。物語のテーマとしては、「人間性とは何か」「制御と自由」「倫理的責任」などが繰り返し扱われます。代表的な例としては、アイザック・アシモフの「I, Robot」に見られる規範(ロボット三原則)や、映画『ターミネーター』『ブレードランナー』『A.I.』などがあります。
現実のロボットは多くの場合、特定タスクに最適化されたツールであり、フィクションほど万能でも自律的でもありません。ただし、機械学習の進展やセンサー技術の向上により、認識・判断の幅は急速に広がっています。
社会的・倫理的課題
- 雇用への影響:自動化による職務の置き換えと、新たな職種の創出のバランス。
- 安全性と信頼性:誤作動やセキュリティ侵害が人命に直結する場面でのリスク管理。
- 責任の所在:事故や損害が起きたとき誰が責任を負うか(製造者、運用者、ソフトウェア開発者など)。
- プライバシーと監視:センサーやカメラを用いた情報収集の適正な取り扱い。
- 軍事利用:自律兵器の倫理問題や国際的な規制の必要性。
今後の展望と学び方
ロボット技術はハードウェア(素材・駆動系)とソフトウェア(AI、機械学習、制御理論)の両面で進化を続けています。産業応用だけでなく、介護・医療・災害対応・環境保全など、人々の生活や社会課題の解決に貢献する可能性が大きい分野です。学ぶには電子工学、機械工学、制御工学、プログラミング、AIの基礎を段階的に身につけるのがおすすめです。
さらに詳しい技術用語や法規、実践的な設計について知りたい場合は、関係する専門書やオンライン教材、大学・公共研究機関の公開資料を参照してください。

歴史
私たちのために働いてくれる機械を作ることに、人々は長い間関心を寄せてきました。しかし、たった1台の機械を作るには時間とお金がかかるので、初期のアイデアは作られなかった。レオナルド・ダ・ヴィンチは、1464年に騎士のような人型の機械を設計しました。ロープと車輪で制御するものである。他の技術者や夢想家も機械人間を描いた。1920年、カレル・チャペックは彼らについての物語を書き、「仕事」につながるチェコ語の単語、「ロボット」を使った。
20世紀に最も成功したロボットのデザインは、人間のように見えるように作られたものではありません。使うためにデザインされたのです。ジョージ・デボルは1954年に、片腕と片手を持つ最初のロボット「ユニメート」を作りました。1960年にゼネラルモーターズがこれを買い取った。翌年、ニュージャージー州の工場で、人が触れるには熱すぎる金属片を持ち上げたり、積み上げたりして働き始めた。エンジニアは、このロボットをプログラムし、必要なら再プログラムすることができた。
現代のロボット
ロボットにはさまざまな用途があります。多くの工場では、難しい仕事を素早く、あまりミスなくこなすためにロボットが使われています。彼らは人のようには見えませんが、物事を行うために作られているからです。これらは「産業用」ロボットです。爆弾を見つけたり、取り除いたりするロボットもあります。もし誰かがミスをすれば、ロボットはダメージを受けたり破壊されたりしますが、人が殺されるよりはましです。また、家庭で掃除機をかけたり、芝刈り機を動かしたりするようなロボットもあります。そのようなロボットは、仕事の領域を学習する必要があります。
人間の手では大きすぎる体内の場所を、数台のロボットが手術してくれるのです。
プラネットローバーは、遠くの惑星を探査するためのロボットです。地球から他の惑星に電波を送るには時間がかかるため、地球からの指令を受けず、ロボットだけで作業を行います。
ロボットといえば、2本の足と2本の腕、そして頭がある、人のような形をしているというイメージがまだあります。ASIMOは、科学者がロボットの設計やプログラミングの方法を学ぶのに役立つロボットの一つです。ASIMOは歩くことができますが、これをプログラムするのは簡単ではありません。

東洋と西洋の景色
ロボットに対する東洋の思想
世界のロボットのおよそ半分がアジアに、32%がヨーロッパに、そして16%が北米に、1%がオーストラレーシアに、1%がアフリカにあります。世界のロボットの30%は日本にある。日本は世界のどの国よりもロボットの数が多く、世界のロボット産業をリードしています。実際、日本は世界のロボットの首都と言われています。
日本や韓国では、未来のロボットに対する考え方は、主に肯定的なものであった。日本や韓国でロボットが好意的に受け入れられているのは、有名なアニメのロボット「鉄腕アトム」の影響もあるかもしれません。中国は、日本や韓国と同じようなロボットに対する考え方を示しているが、ロボット開発ではアメリカやヨーロッパに遅れをとっている。東アジアの考え方は、ロボットは人間とほぼ同等であるべきというものです。ロボットが老人の世話をしたり、子供に教えたり、アシスタントをしたりすることは可能だと考えています。東アジアでは、ロボットがもっと普及し、進化していくことが望ましいという考え方が一般的です。これは、西洋の一般的な考え方とは正反対です。
「人間とロボットが共存する時代の幕開けです」と、日本の三菱商事は、日本に数多く存在する人間型ロボットの一つについて述べています。韓国の情報通信省は、2015年から2020年の間に、韓国のすべての家庭にロボットが導入されると予測している。
ロボットに対する欧米の考え方
欧米社会では、ロボットの開発に反対、あるいは恐れを抱く傾向があります。SF映画などでは、人類に対する危険な反抗者として描かれることが多い。
欧米ではロボットを人間の未来に対する「脅威」とみなしており、これはアブラハムの宗教的影響によるところが大きく、自分で考えることのできる機械を作ることは、ほとんど神を演じることになると考えています。もちろん、この境界線は明確ではありませんが、この2つのイデオロギーには大きな違いがあります。

ロボットの法則
作家のアイザック・アシモフは、ロボットから人間を守るためにロボット工学の3つの法則を持つロボットの話をたくさんしていた。
- ロボットは人間を傷つけてはならないし、不作為によって人間に危害を加えることを許してはならない。
- ロボットは人間から与えられた命令に従わなければならないが、その命令が第一法則に抵触する場合は例外である。
- ロボットは、その保護が第一法則や第二法則に抵触しない限り、自らの存在を保護しなければならない。
これらは、彼が発明した当時、実生活では使われていなかった。しかし、現代ではロボットはより複雑になり、アイザック・アシモフが考案した3法則のような本当の法則が必要になる日が来るかもしれません。
韓国は世界で初めてロボットに関する法律を制定した国です。
関連ページ
- NASA
- アニマトロニクス - ロボット工学を応用した人形制作
- ナビゲーション
- テクノセクシュアリティ
- ベックス
質問と回答
Q: ロボットとは何ですか?
A: ロボットは動いたり、特定の作業を行うことができる機械です。
Q: ロボットはどのように制御されるのですか?
A: ロボットはコンピュータプログラムまたは電子回路によって制御されます。
Q: ロボットは常に人間が直接制御するのですか?
A:いいえ、ロボットは人間が直接制御することもできますが、必ずしもそうである必要はありません。
Q:ロボットは感情を持つことができますか?
A:いいえ、ロボットは人間のように見えるように設計されていても、感情を持つことはありません。
Q:ロボットは常に人間のように見えるのですか?
A:いいえ、ほとんどのロボットは特定の仕事をするため、常に人間のような姿をしているわけではありません。
Q: フィクションのロボットと現実のロボットはどう違うのですか?
A:フィクションでは、ロボットは通常、人間のように見え、それ自身の生命を持っているように見えますが、現実のロボットは様々な形態があります。
Q:ロボットが登場する最も有名な本は何ですか?
A:アイザック・アシモフの「I, Robot」は、ロボットが登場する最も有名な本でしょう。
関連項目
著者
AlegsaOnline.com ロボットとは|定義・仕組み・種類とフィクションでの描写 Leandro Alegsa
URL: https://ja.alegsaonline.com/art/83464